Robotics At The Service Of Autistic Children
With PIRoS (Perception, interaction, social robotics), Mohamed Chetouani created the first French integrated research team in social robotics. Surrounded by clinicians and artificial intelligence experts, he has successfully brought information and communication technologies to the service of children with autism spectrum disorders.
Holder of a thesis in signal processing, Mohamed Chetouani has always relied on interdisciplinarity. This specialist in social robotics integrates the ISIR1 with the desire to put the analysis of human behavior at the heart of its research. He then became interested in autism spectrum disorders (ASD).
” I contacted the head of the child and adolescent psychiatry service at La Pitié-Salpêtrière, David Cohen, to suggest that he use signal processing as part of the analysis of social behavior, recalls Mohamed Chetouani. We have started to conduct studies around ASD. ”
One of the main difficulties with ASD concerns about social interactions and limited and stereotypical interests. To this is often added other deficits such as those related to language, attention or understanding and expression of emotions.
” If psychiatrists have long analyzed children’s behaviors to identify early signs of ASD, it remains difficult and tedious to measure gestures, postures, tone of voice, facial expressions, imitation, etc., parents and children during their interactions, “
Mohamed Chetouani.
However, it is by measuring these interactions more precisely that researchers will be able to improve the still too late diagnosis of this disorder evaluated on average at the age of 3 years.
Analyze behavior through social signal processing
In order to better assess these disorders, the researchers in the PIRoS 2 team help clinicians by automatically analyzing the behaviors involved in social interactions.

“ When two individuals communicate, they signify their attention by looks, smiles, gestures, sounds, etc. This is what we call synchrony. By modeling the behavior of one or more individuals, we can analyze this phenomenon, ”explains Mohamed Chetouani.
By using family films, the researchers thus showed how the synchrony of parent-child interactions made it possible to distinguish early babies with autism from babies without the autistic disorder.
” We then wanted to create our own experimental situations,” specifies the researcher, by opening rooms at Pitié-Salpêtrière with rooms equipped with cameras and microphones to finely analyze social interactions in controlled environments. ”
In this experimental space, Mohamed Chetouani has set up, with his colleagues, research projects bringing together students in engineering sciences and students in psychiatry, speech therapy or psychology. Thanks to this interdisciplinary work, the researchers were able to enrich their studies by comparing conventional clinical measures of social interactions with objective measures resulting from signal processing.
When two individuals communicate, they signify their attention by looks, smiles, gestures, sounds, etc. This is what we call synchrony. By modeling the behavior of one or more individuals, we can analyze this phenomenon.
MOHAMED CHETOUANI
Serious games to improve children’s social interactions
As part of this research, the PIRoS team was also able to test concrete solutions to help children suffering from ASD to develop their social skills. They created serious games intended to train specific skills such as the recognition of emotions, imitation or joint attention. They have thus developed a program on a tablet where the child, after learning to associate an expression, a posture or a gesture with emotion, is invited to reproduce it. Thanks to an emotional recognition algorithm, the JE Mime software is then able to give the player real-time feedback on the quality of his imitation.
Another game developed by the team, the GOLIAH software makes it possible to work on imitation and joint attention using two connected tablets (one for the child, the other for the parents or the therapist). In this game, the child, to evolve, needs to communicate with a third party. The software is also able to measure the child’s interactions. The data collected by the software can be consulted remotely by the therapist and then allow the doctor to better adapt the therapeutic work to be done during sessions at the hospital, school or at home.
” The idea is not that it becomes good on the game of the tablet, but overall improves its social interactions, “
Mohamed Chetouani.
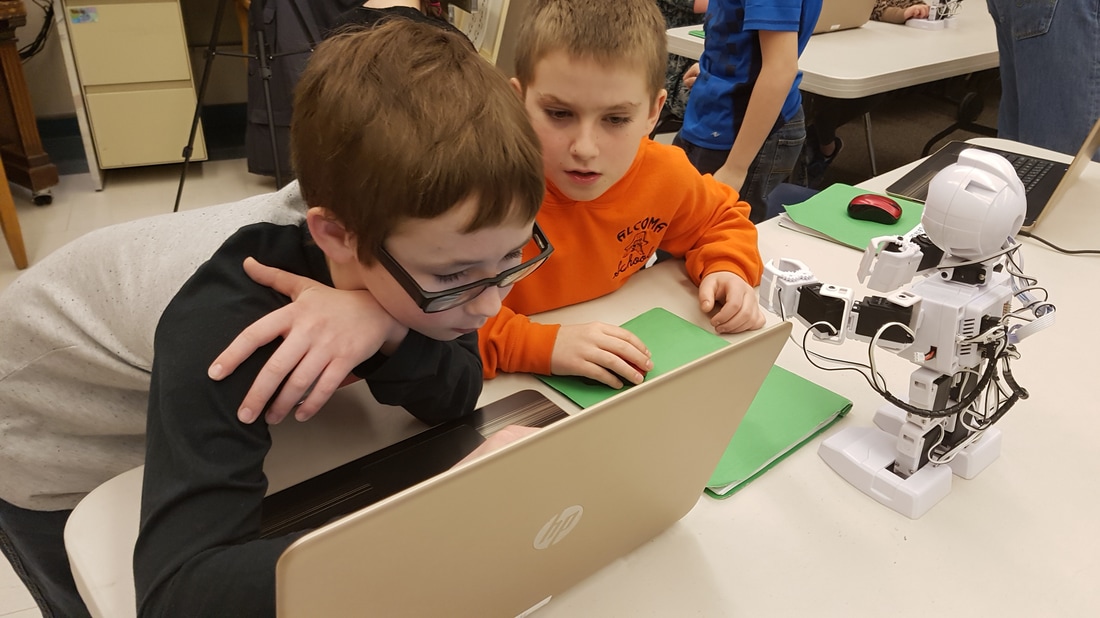
When children teach robots
But the involvement of researchers from the PIRoS team does not stop at the development of serious games. At the Pitié-Salpêtrière hospital, researchers benefit from the existence of a school adapted to children with developmental disabilities. For scientists, it is a real experimental place in which they can study the integration of a robot within a class.

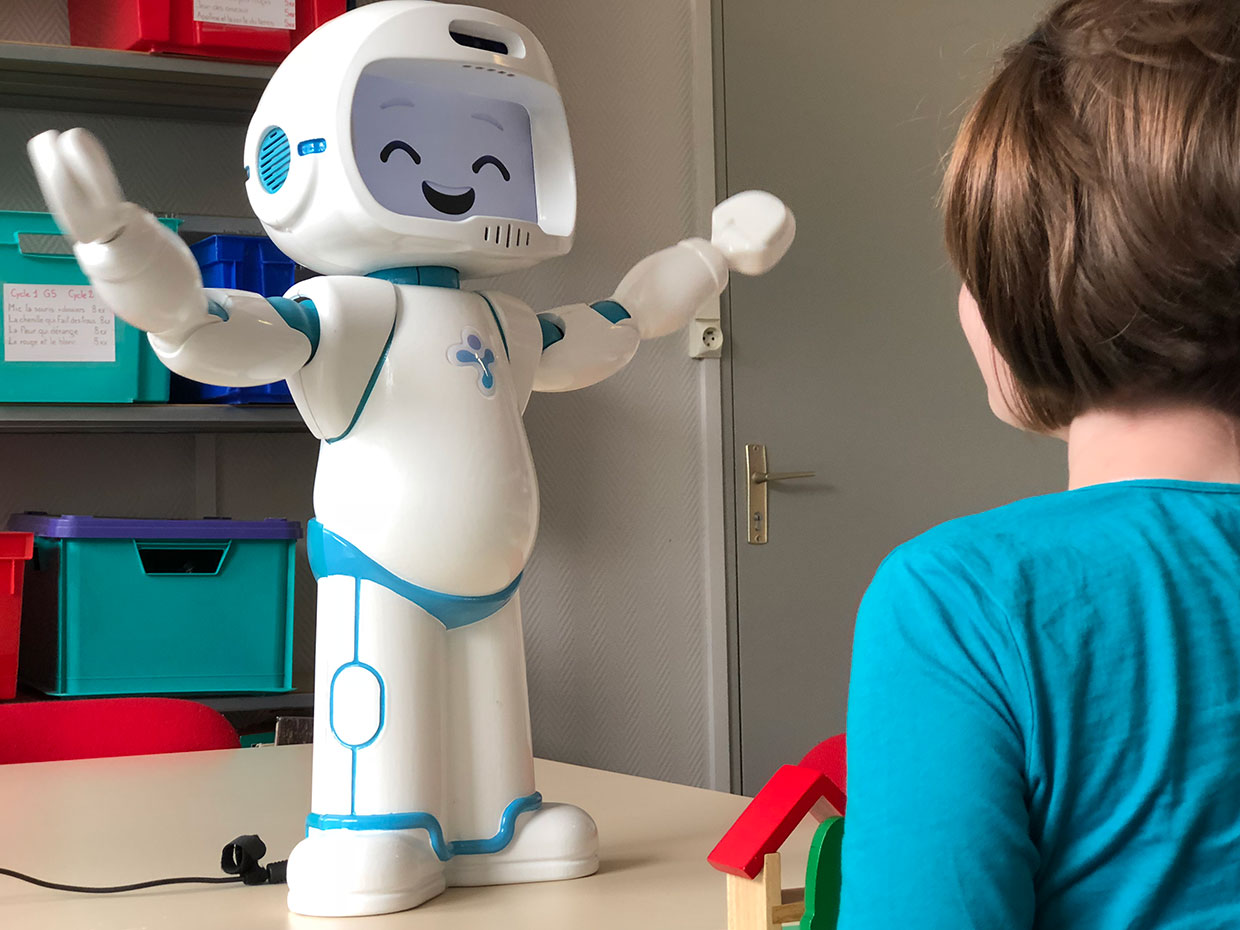
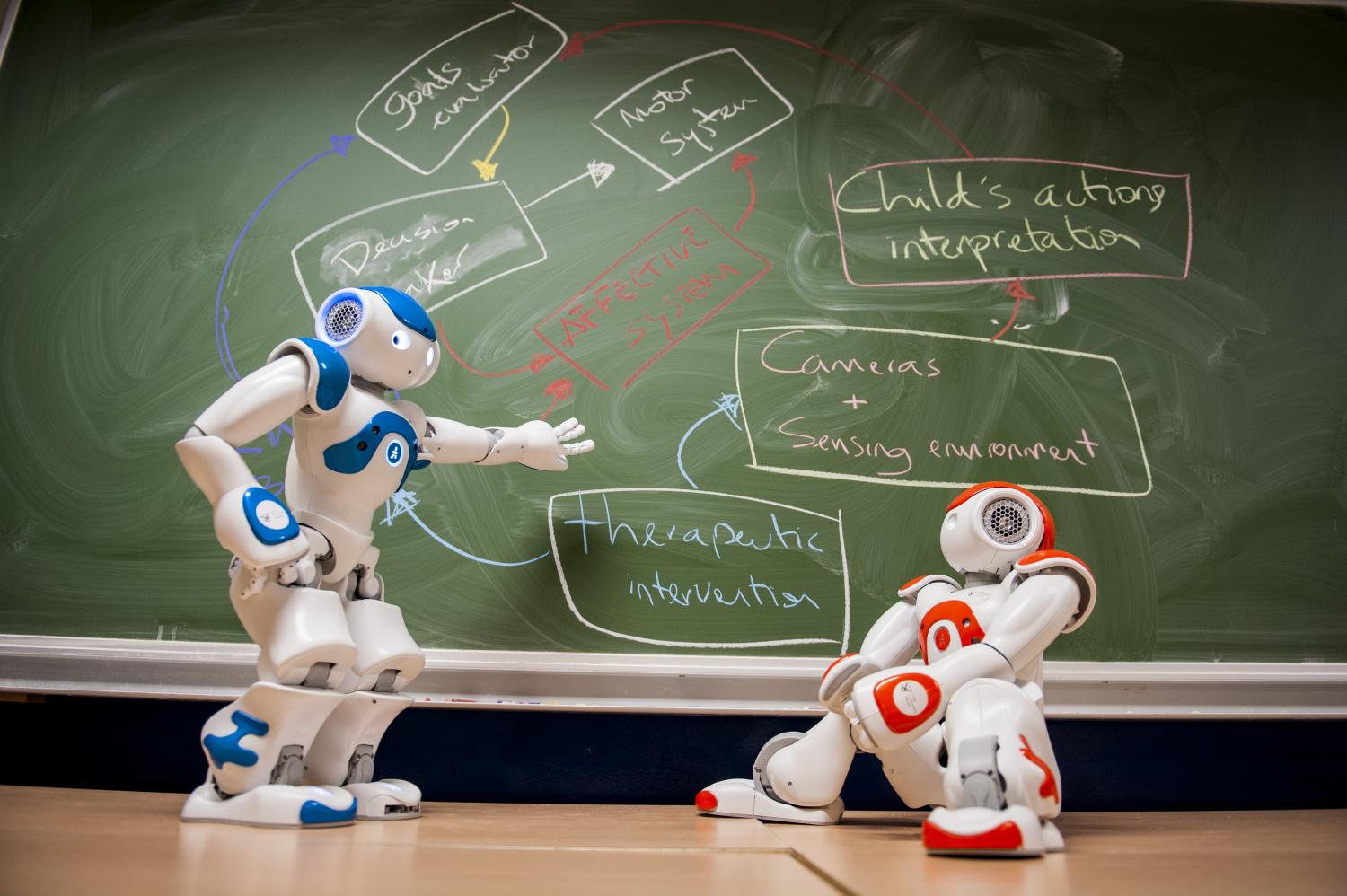
“In robotics, people usually think that robots will help humans. We chose the opposite situation: that of asking the children to teach Nao, a small humanoid robot, ”explains the researcher.
Often passive in conventional therapies, children suffering from ASD are responsible for teaching the robot here. Obliged to communicate and mobilize their skills, they also immediately see the effect of their teaching: if they do the gestures wrong, the robot will perform them badly.
“Teaching the robot greatly values the child who feels responsible for learning Nao,” says Mohamed Chetouani.
The PIRoS team also created a fun and engaging device to stimulate children by asking them to imitate the postures and gestures of the robot. After a few minutes, the roles are reversed and the robot can, in turn, imitate, thanks to artificial intelligence, the movements made by the child.
“Thanks to the robot’s sensors, we can follow up with the therapists on the child’s progress thanks to clinical observations but also to objective measures taken by the robot,” says the researcher.
Building on these experiences, Mohamed Chetouani joined the committee of the fourth autism plan in 2018. Its measurement, aimed at evaluating with scientific methods and in everyday situations the technological devices facilitating the learning and the autonomy of autistic people, was chosen. Since then, he has co-led a group of experts responsible for supporting the creation of dedicated experimental centers. These structures which bring together people suffering from ASD and their relatives, but also researchers, clinicians, teachers and entrepreneurs, aiming to develop and evaluate technological innovation for people with autism in order to facilitate their educational and social inclusion.
Teaching the robot greatly values the child who feels responsible for learning Nao.
MOHAMED CHETOUANI